Asymmetries in the disturbance compensation methods for the stable and unstable first order plants
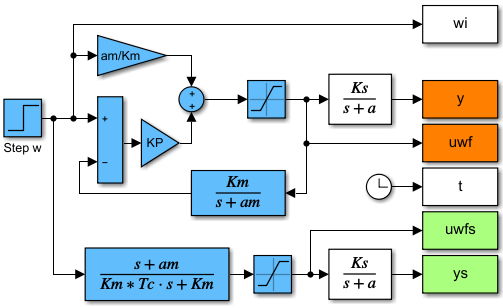
Open loop (transfer function based) and closed loop 2DOF P control based constrained setpoint feedforward implementations with a unit setpoint step
Simulations